- Etapa de sensado
- Etapa de potencia: batería
- Etapa de inteligencia
- Etapa motriz

Este carrito consta, basicamente de las siguientes partes:
|
|
| Se está suponiendo que si los sensores detectan fondo blanco devuelven un "1" lógico. En tanto que si detectan la pista oscura (debe ser negra), los sensores devuelven un "0" lógico. Cuando un sensor detectó oscuro, se dice que el carrito se ha salido de la trayectoria. Para meter al carrito en la trayectoria se detiene el motor de su lado, así el motor del lado opuesto meterá al carrito en la trayectoria. |

|
|
 |
|
 |
|
El chasís del carrito es la parte más simple dado que se trata de una superficie plana de cartón rígido. Se recomienda la forma siguiente: |

|
|
Hoy día existen los «cargadores portátiles para smartphone». Estos dispositivos tienen una entrada microusb para su recarga y poseen un puerto USB para aimentar al smartphone. El cargador portátil es mas bien una batería de ión-litio con circuitería embebida para su recarga lo que la hace muy práctica. | 
|
|
Para hacer uso de esta batería se requiere de un «plug usb para soldar, sin cubierta». Esta clavija corresponde con n puerto USB tipo A El terminal izquierdo corresponde con GND y el terminal derecho corresponde con 5V. | 
|
|
Se usará el «Led Infrarrojo IR383». La terminal más larga es el positivo. | 
|
|
El fototransistor es un transistor NPN cuya base no tiene conexión externa y está dada por una superficie fotosensible; de forma externa solo cuenta con el Colector (patilla más corta), y el emisor (patilla más larga). |
|
El diagrama de conexiones es el mostrado. | 
|
|
La forma de operar el dispositivo es simple. Ambos componentes de colocan uno junto a otro. La luz del emisor rebotará en una superficie blanca e incidirá en el receptor. Si la superficie es negra, la luz infrarroja se absorve. | 
|
|
Se usarán motoreductores de plástico. El tipo de rueda puede cambiar deacuerdo al proveedor. El lector debe considerar que ambos motoreductores tengan la misma relación de reducción. | 
|
|
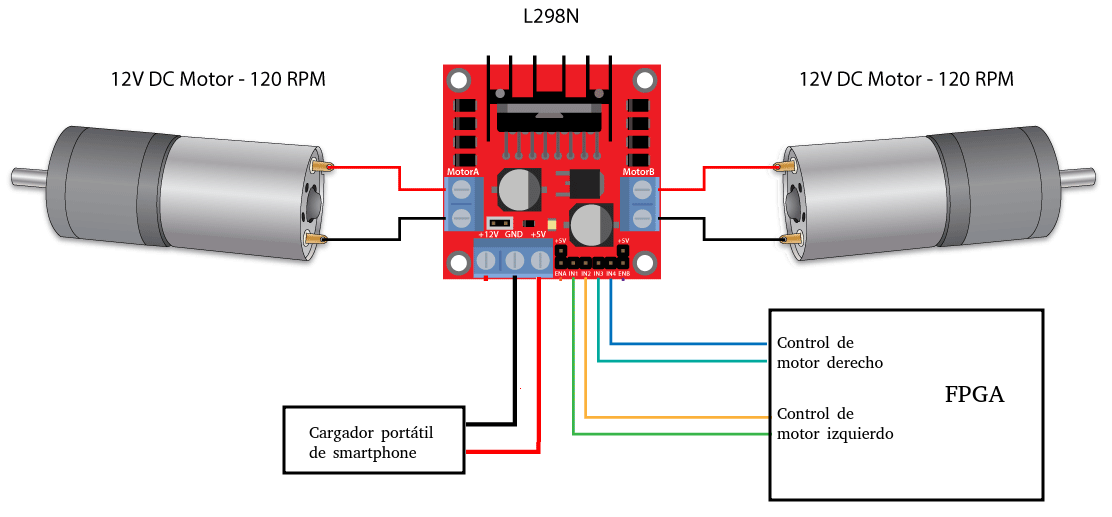
Los motoreductores no pueden alimentarse directamente con la tarjeta, así que se requiere de un driver que desvíe la corriente desde una batería externa. Este driver está basado en el integrado L298. | 
|