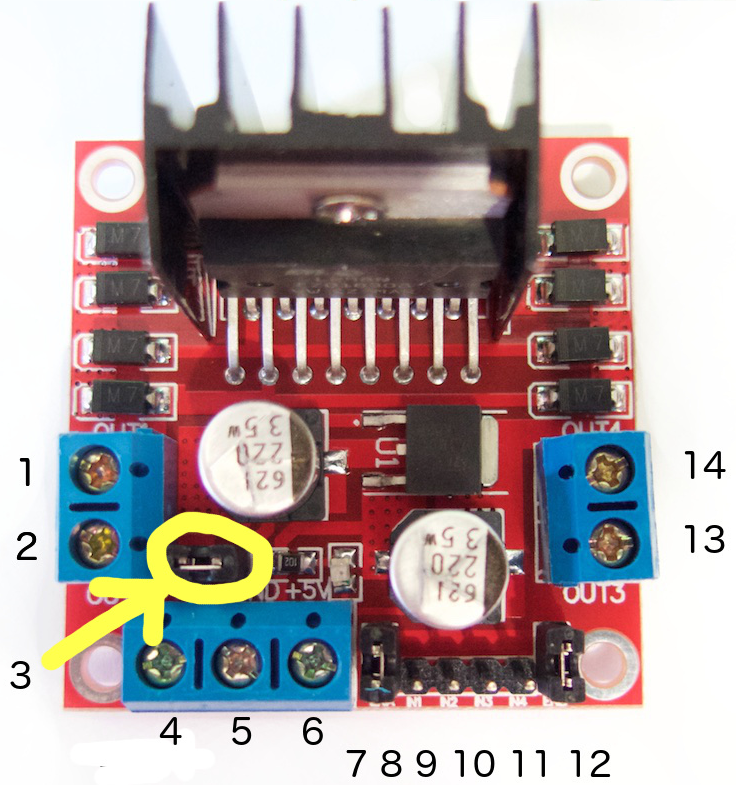
- OUT 1
- OUT 2
- 12V jumper. Remove this if using a supply voltage greater than 12V DC. This enables power to the onboard 5V regulator
- External source: de 6 V a 12V. Remueve el «12V jumper» si la polarización es de 12V a 35V.
- GND
- 5V regulated output. Solamente si el «12V jumper» está en su lugar. Este terminal se puede usar para polarizar otros circuitos como el Arduino.
- Enable 1 jumper. Este puente habilita los terminales «OUT 1» y «OUT 2».
- IN 1
- IN 2
- IN 3
- IN 4
- Enable 2 jumper. Este puente habilita los terminales «OUT 3» y «OUT 4».
- OUT 3
- OUT 4